Siła w ruchu harmonicznym
Wprawienie dowolnego ciała w ruch wymaga przyłożenia siły o odpowiedniej wartości. Zgodnie z drugą zasadą dynamiki Newtona konsekwencją działania stałej siły na ciało o masie m jest nadanie ciału stałego przyspieszenia a. W przypadku ruchu harmonicznego wartość przyspieszenia a nie jest stała, lecz, zgodnie z poniższym wzorem, ulega ciągłej zmianie w funkcji czasu:
$$a (t) = \hspace{.1cm} – \hspace{.1cm} \omega^2 \hspace{.05cm} x (t)$$
Zmienna wartość przyspieszenia oznacza, że siła F, wywołująca ruch harmoniczny, jest siłą zmienną.
Siła w ruchu harmonicznym – wzór
Wartość siły w ruchu harmonicznym wyznaczymy w oparciu o drugą zasadę dynamiki Newtona:
$$\vec{F}_{wyp} = m \hspace{.05cm} \vec{a}$$
Wstawiając w miejsce a zależność opisującą przyspieszenie ciała w ruchu harmonicznym, dostaniemy:
$$F (t) = \hspace{.1cm} – \hspace{.1cm} m \hspace{.05cm} \omega^2 \hspace{.05cm} x (t)$$
Zauważ, że siła działająca na ciało w ruchu harmonicznym jest proporcjonalna do jego przemieszczenia, lecz przeciwnie skierowana. Oznacza to, że podczas wychylenia ciała z położenia równowagi, siła ta zawsze zwrócona jest w stronę tego punktu. Poprzez analogię do wyrażenia opisującego prawo Hooke’a:
$$F = \hspace{.1cm} – \hspace{.1cm} k \hspace{.05cm} x$$
wielkość m ω2, występująca we wzorze na F(t), odpowiada stałej k nazywanej stałą sprężystości, której jednostką jest N/m:
$$k = m \hspace{.05cm} \omega^2$$
Częstość kołowa i okres drgań oscylatora harmonicznego
Zależność $k = m \hspace{.05cm} \omega^2$ jest bardzo pomocna w obliczaniu częstości kołowej drgań ω układu drgającego składającego się np. z klocka o masie m i sprężyny o stałej k (masę sprężyny pomijamy), czy też struny gitary o masie m i stałej k :
$$\omega = \sqrt{\frac{\mathstrut k}{m}}$$
W oparciu o powyższy wzór możemy także uzyskać wyrażenie na okres drgań T takiego układu:
$$T = \frac{2 \hspace{.05cm} \pi}{\omega} = 2 \hspace{.05cm} \pi \hspace{.05cm} \sqrt{\frac{\mathstrut m}{k}}$$
Zwróć uwagę, że częstość ω jest tym większa im większa jest wartość stałej sprężystości k oraz im mniejsza jest masa m ciała wykonującego drgania.
Każdy układ drgający, w którym siła jest liniowo proporcjonalna do przemieszczania ciała oraz przeciwnie do niego skierowana, nazywa się liniowym oscylatorem harmonicznym.
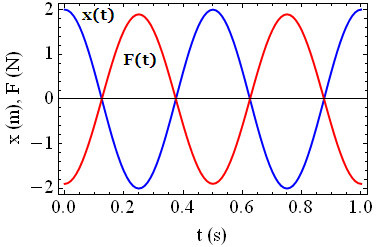
Zależność siły w funkcji czasu w ruchu harmonicznym – wykres
Na poniższym rysunku przedstawiono zależność przemieszczenia x(t) (niebieska krzywa) oraz siły F(t) (czerwona krzywa) dla ciała o masie m = 6 g drgającego ruchem harmonicznym z amplitudą drgań A = 2 m, okresem T = 0,5 s i początkową fazą drgań φ = 0. Zauważ, że zgodnie z tym co napisaliśmy wyżej, siła F jest rzeczywiście proporcjonalna do wychylenia x ciała z przeciwnym znakiem – siła wzrasta (maleje) wraz ze wzrostem (spadkiem) wychylenia, osiągając maksymalną wartość w punkcie maksymalnego wychylenia ciała oraz przyjmuje wartość zero, gdy położenie ciała odpowiada położeniu równowagi w zerze.
Dodaj komentarz