Arkusz maturalny z fizyki – poziom rozszerzony – rok 2015 („nowa matura”) – zadania nr 1 – 4

Aby obręcz po upadku mogła wrócić do gimnastyczki, kierunek obrotu obręczy musi być zgodny z kierunkiem ruchu wskazówek zegara ![]() .
.

Przy braku oporu powietrza wartość prędkości ruchu obrotowego obręczy nie będzie ulegać zmianie, w związku z czym prędkość obręczy będzie taka sama od momentu wyrzucenia aż do upadku.
Prawidłowa odpowiedź: D.

Zgodnie z zasadą zachowania momentu pędu moment pędu ciała pozostaje stały, gdy nie działa na nie żaden moment siły zewnętrznej. Brak obecności momentów sił zewnętrznych działających na obręcz powoduje, że kierunek wektora momentu pędu obręczy jest zachowany, w związku z czym obręcz po upadku w punkcie C może toczyć się w kierunku gimnastyczki.
Prawidłowa odpowiedź: zasada zachowania momentu pędu.

Powrót obręczy z położenia C do gimnastyczki jest skutkiem działania siły tarcia kinetycznego, zwróconej przeciwnie do kierunku ruchu obręczy.
Prawidłowa odpowiedź: B.

Gdy wózek znajduje się w spoczynku oraz, gdy porusza się ruchem jednostajnym prostoliniowym poziom cieczy w naczyniu jest nachylony pod pewnym kątem do powierzchni równi:
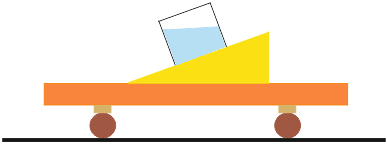
Aby powierzchnia wody w naczyniu stała się równoległa do powierzchni równi, dodatkowa siła działająca na wózek musi być zwrócona w lewo (przyłożenie siły w prawą stronę jeszcze bardziej zwiększyłoby kąt nachylenia poziomu wody). Dla tak zdefiniowanego układu kierunek wózka nie wpłynie na położenie poziomu wody w naczyniu, dlatego ruch wózka może odbywać się w lewo lub w prawo.
Prawidłowa odpowiedź: B – 3.

Zdanie 1
Siła naciągu liny w każdym jej punkcie ma taką samą wartość, w związku z czym zdanie 1 jest fałszywe.
Zdanie 2
W początkowej fazie ruchu kąt β przyjmuje maksymalną wartość. Wraz z oddalaniem się traktora od podpory, kąt β stopniowo maleje, dlatego zdanie 2 jest prawdziwe.
Zdanie 3
Jeden koniec liny przymocowany jest do traktora, drugi koniec do górnego końca słupa, odległego o l (l – wysokość słupa) od jego podstawy. Im większa wysokość, tym większa siła potrzebna do postawienia słupa, a więc tym większa siła naciągu liny.
Prawidłowa odpowiedź: 1 – F, 2 – P, 3 – P.

Słup traktujemy jak bryłę sztywną. Wiemy, że środek masy słupa znajduje się w połowie jego długości l, w związku z czym siła ciężkości $\vec{F_g}$ działająca na słup jest przyłożona do niego właśnie w tym punkcie. Siłą działającą w tym samym kierunku, lecz przeciwnie zwróconą do siły ciężkości jest składowa $\vec{N_y}$ siły naciągu liny $\vec{N}$ równa $\vec{N_y} = \vec{N} \hspace{.05cm} \textrm{sin} \hspace{.03cm} \alpha$ :

Aby obliczyć wartość siły naciągu liny skorzystamy z równowagi momentów sił: ciężkości oraz naciągu liny. Obydwa momenty sił zapiszemy względem osi przechodzącej przez obrotową podstawę walca, oznaczoną na powyższym rysunku linią przerywaną. Ramieniem siły ciężkości $\vec{F_g}$ jest odległość od środka masy do podstawy walca równa $\frac{l}{2}$, a ramieniem składowej siły naciągu $\vec{N_y}$ jest odległość od końca słupa do podstawy walca równa $l$. Z równowagi momentów sił mamy:
$$M_g = M_n \hspace{1cm} \longrightarrow \hspace{1cm} m \hspace{.05cm} g \hspace{.05cm} \tfrac{l}{2} = N \hspace{.05cm} \textrm{sin} \hspace{.03cm} \alpha \hspace{.05cm} l$$
Po przekształceniu i podstawieniu wartości liczbowych, dostaniemy:
$$N = \frac{m \hspace{.05cm} g}{2 \hspace{.05cm} \textrm{sin} \hspace{.03cm} \alpha} = \frac{2000 \hspace{.05cm} \textrm{kg} \cdot 9,\hspace{-.1cm}81 \hspace{.05cm} \tfrac{\textrm{m}}{\textrm{s}^2}}{2 \cdot \textrm{sin} \hspace{.03cm} 15^{\textrm{o}}} \cong 37,\hspace{-.1cm}9 \hspace{.05cm} \textrm{kN}$$
Prawidłowa odpowiedź: N = 37,9 kN.

W tym zadaniu korzystamy z zasady zachowania energii mechanicznej. W chwili zerwania liny całkowita energia mechaniczna słupa równa jest energii potencjalnej grawitacji słupa $E_p = m \hspace{.05cm} g \hspace{.05cm} \frac{l}{2}$ – środek masy słupa znajduje się w połowie jego długości, w związku z czym całkowita masa słupa skupiona jest właśnie w tym punkcie. W chwili upadku całkowita energia mechaniczna słupa równa jest energii kinetycznej ruchu obrotowego słupa $E_k = \frac{1}{2} \hspace{.05cm} I \hspace{.05cm} \omega^2$, gdzie I to moment bezwładności słupa równy $I = \frac{1}{3} \hspace{.05cm} m \hspace{.05cm} l^2$, ω – prędkość kątowa słupa równa $\omega = \frac{V}{l}$. Po przyrównaniu tych dwóch rodzajów energii otrzymamy:
$$m \hspace{.05cm} g \hspace{.05cm} \tfrac{l}{2} = \tfrac{1}{2} \hspace{.05cm} I \hspace{.05cm} \omega^2 = \tfrac{1}{2} \cdot \tfrac{1}{3} \cdot m \hspace{.05cm} l^2 \cdot \frac{V^2}{l^2} = \tfrac{1}{6} \hspace{.05cm} m \hspace{.05cm} V^2$$
i w konsekwencji:
$$V = \sqrt{\mathstrut 3 \hspace{.05cm} g \hspace{.05cm} l} = \sqrt{\mathstrut 3 \cdot 9,\hspace{-.1cm}81 \hspace{.05cm} \tfrac{\textrm{m}}{\textrm{s}^2} \cdot 12 \hspace{.05cm} \textrm{m}} = 18,\hspace{-.1cm}8 \hspace{.05cm} \tfrac{\textrm{m}}{\textrm{s}}$$
Prawidłowa odpowiedź: V = 18,8 m/s.

Wartość energii potencjalnej Ep układu wózek – sprężyna zależy wprost proporcjonalnie od wychylenia układu z położenia równowagi. Dla położenia x = 0 m Ep = 0 J, a dla x = xmax Ep = Ep,max. Zależność Ep (x ) poprawnie opisuje więc krzywa C.
Zupełnie odwrotna sytuacja, do opisanej powyżej, występuje w przypadku energii kinetycznej Ek układu wózek – sprężyna. Dla położenia x = 0 m Ek = Ek,max, a dla x = xmax Ek = 0 J. Zależność Ek (x ) poprawnie opisuje więc krzywa B.
Energia całkowita układu drgającego zawsze pozostaje stała w czasie (przy założeniu braku oporów ruchu), dlatego zależność Ec (x ) przedstawia krzywa A.
Więcej informacji znajdziesz w artykule Energia w ruchu harmonicznym.
Prawidłowa odpowiedź: energia kinetyczna – B, energia potencjalna – C, energia całkowita – A.

Zdanie 1
Prędkość, z definicji, jest wprost proporcjonalna do położenia ciała. Nie inaczej jest w przypadku wózka. Energia kinetyczna wózka jest wprost proporcjonalna do jego prędkości, w związku z czym musi być również wprost proporcjonalna do wychylenia wózka z położenia równowagi.
Zdanie 2
Aby odpowiedzieć na to pytanie wystarczy przeanalizować powyższy wykres. W punkcie maksymalnego wychylenia z położenia równowagi x = ± 4 cm układ osiąga maksymalną wartość energii potencjalnej równą 4 mJ. Przy przechodzeniu wózka przez położenie równowagi x = 0 m energia kinetyczna układu przyjmuje maksymalną wartość równą 4 mJ, zatem Ep,max = Ek,max.
Zdanie 3
Energia całkowita układu drgającego jest równa sumie energii kinetycznej i energii potencjalnej układu. Gdy energia kinetyczna przyjmuje wartość maksymalną, energia potencjalna układu wynosi zero, w związku z czym Ec = Ek,max. Przy założeniu braku oporów ruchu, energia całkowita pozostaje stała w czasie, a jej wartość jest równa maksymalnej energii kinetycznej układu.
Prawidłowa odpowiedź: 1 – F, 2 – P, 3 – P.

Maksymalna prędkość wózka związana jest z maksymalną wartością energii kinetycznej układu wózek – sprężyna, która zgodnie z wykresem E (x ) wynosi Ek,max = 4 mJ.
Masa wózka jest znana i wynosi m = 200 g = 0,2 kg, więc:
$$E_{k,max} = \tfrac{1}{2} \hspace{.05cm} m \hspace{.05cm} V^2_{max} \hspace{1cm} \longrightarrow \hspace{1cm} V_{max} = \sqrt{\frac{\mathstrut 2 \hspace{.05cm} E_{k,max}}{m}} = \sqrt{\frac{\mathstrut 2 \cdot 4 \cdot 10^{-3} \hspace{.05cm} \textrm{J}}{0,\hspace{-.1cm}2 \hspace{.05cm} \textrm{kg}}} = 0,\hspace{-.1cm}2 \hspace{.05cm} \tfrac{\textrm{m}}{\textrm{s}}$$
Prawidłowa odpowiedź: Vmax = 0,2 m/s.

Częstość kołowa układu wózek – sprężyna wynosi:
$$\omega = \sqrt{\frac{\mathstrut k}{m}}$$
gdzie:
k – stała sprężystości sprężyny,
m – masa wózka.
Ponieważ $\omega = \dfrac{2 \pi}{T}$, więc:
$$\frac{2 \hspace{.05cm} \pi}{T} = \sqrt{\frac{\mathstrut k}{m}} \hspace{1cm} \longrightarrow \hspace{1cm} T = 2 \hspace{.05cm} \pi \hspace{.05cm} \sqrt{\frac{\mathstrut m}{k}}$$
Masę wózka znamy. Stałą sprężystości k musimy znaleźć. Energia całkowita układu wózek – sprężyna pozostaje stała w czasie i wynosi 4 mJ. Wiedząc, że $E_c = \frac{1}{2} \hspace{.05cm} x^2_{max} \hspace{.05cm} k$, gdzie xmax – maksymalne wychylenie układu z położenia równowagi równe amplitudzie drgań (zobacz: Energia w ruchu harmonicznym), otrzymamy:
$$k = \frac{2 \hspace{.05cm} E_c}{x^2_{max}} = \frac{2 \cdot 4 \cdot 10^{-3} \hspace{.05cm} \textrm{J}}{\left( 0,\hspace{-.1cm}04 \hspace{.05cm} \textrm{m} \right)^2} = 5 \hspace{.05cm} \tfrac{\textrm{N}}{\textrm{m}}$$
i w konsekwencji:
$$T = 2 \cdot 3,\hspace{-.1cm}14 \cdot \sqrt{\frac{\mathstrut 0,\hspace{-.1cm}2 \hspace{.05cm} \textrm{kg}}{5 \hspace{.05cm} \tfrac{\textrm{N}}{\textrm{m}}}} = 1,\hspace{-.1cm}3 \hspace{.05cm} \textrm{s}$$
Prawidłowa odpowiedź: T = 1,3 s.
Rozwiązania kolejnych zadań z tego arkusza maturalnego znajdziesz na poniższych stronach:
Dodaj komentarz